- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Maison
>
Des produits > Moteur pas à pas en boucle fermée > Moteur pas à pas triphasé en boucle fermée > Moteur pas à pas en boucle fermée Nema23 triphasé série 57
Des produits
- Moteur servo à courant alternatif
- Servomoteur CC
- Moteur pas à pas en boucle fermée
- Moteur pas à pas hybride
- Pilote de moteur pas à pas hybride
- Pilote de moteur pas à pas en boucle fermée
- Pilote de servomoteur AC
- Moteur pas à pas intégré
- Pilote de servomoteur CC
- Moteur à vis
- Pilote pas à pas de type bus RS485 ou CAN ou Ethercat
- Réducteur planétaire
- Contrôleur API
- Écran tactile IHM
- Kit de pilote de servomoteur AC Ethercat
- Kit de pilote de servomoteur AC A8
- Servomoteur intégré
Nouveaux produits
 Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 235N.m 37KW AC380V 73A 1500/2000 tr/min IP65
Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 235N.m 37KW AC380V 73A 1500/2000 tr/min IP65 Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 191N.m 30KW AC380V 52A 1500/2000 tr/min IP65
Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 191N.m 30KW AC380V 52A 1500/2000 tr/min IP65 Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 140N.m 22KW AC380V 44.7A 1500/2000 tr/min IP65
Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 140N.m 22KW AC380V 44.7A 1500/2000 tr/min IP65 Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 88N.m 18,5KW AC380V 31,6A 1500/2000 tr/min IP65
Kit de pilotes de servomoteur à courant alternatif Lichuan haute puissance 88N.m 18,5KW AC380V 31,6A 1500/2000 tr/min IP65- Tous les nouveaux produits

Moteur pas à pas en boucle fermée Nema23 triphasé série 57
Vente chaude Chine 57 série 3 phases Nema23 moteur pas à pas en boucle fermée fabricants et fournisseurs d'échantillons gratuits.
envoyer une demande
Description du produit
LICHUAN® vous souhaite la bienvenue dans la vente en gros de moteurs pas à pas triphasés Nema23 à boucle fermée de la série 57 de notre usine. Nos produits sont certifiés CE et disposent actuellement d'un grand nombre d'inventaires d'usine. L'usine de Lichuan a plus de 14 ans d'expérience dans la production. Nous soutenons OEM et ODM, nous vous fournirons un bon service et des prix réduits en usine. Nous invitons davantage de distributeurs à rejoindre LICHUAN.
Moteur pas à pas Nema23 triphasé à boucle fermée de la série 57, utilisation de matières premières de haute qualité et d'acier au silicium à aimant permanent de haute qualité, avec encodeur de haute précision de 1000 lignes, surmonte complètement les problèmes de pas du moteur pas à pas en boucle ouverte, tout en améliorant considérablement les performances du moteur à grande vitesse, pour faciliter la mise à niveau traditionnelle du programme d'entraînement étape par étape, réduction des coûts par rapport au servomoteur pour réduire de plus de 50 %. Longueur du moteur 77 mm ~ 123 mm, plage de couple : 1 N.m ~ 3 N.m, diamètre de l'arbre moteur 8 mm. Le moteur pas à pas Nema23 à boucle fermée triphasé série 57 peut être adapté à 4 types de pilotes : RS485. Peut ouvrir. Ethercat. Pilotes de contrôle d'impulsion.
Paramètres de performances électriques
| Article | Spécifications |
| Précision de l'angle de pas | ± 5 % (étape complète) |
| Précision de la résistance | ±10%(20℃) |
| Précision de l'inductance | ±20%(1KHZ) |
| Hausse de température | 80 ℃ max (courant nominal, mise sous tension biphasée) |
| Température ambiante | -20 ℃ ~ * 50 ℃ |
| La resistance d'isolement | 100MQMin 500VDC |
| Résistance diélectrique | 500 V CA 1 minute |
| Charge radiale autorisée | 0,02 mm Max. (450 g de charge) |
| Charge de poussée autorisée | 0,08 mm Max. (charge de 450 g) |
| Charge radiale maximale | 75N (20 mm de la surface de la bride) |
| Charge maximale de l'arbre | 15N |
| Série | Étape Angle(") |
Longueur (mm) |
Holding Couple (N.m) |
Phase Actuel (A) |
Rotation inertie (g.cm²) |
Poids (kg) |
Résolution de l'encodeur (PPR) |
| LC57H355 | 1.2 | 77 | 1.0 | 3.5 | 300 | 1.0 | 1000 |
| LC57H380 | 1.2 | 102 | 2.0 | 3.5 | 500 | 1.4 | 1000 |
| LC57H3100 | 1.2 | 123 | 3.0 | 4.0 | 700 | 1.8 | 1000 |
Ci-dessus sont des produits représentatifs. Les produits peuvent être personnalisés !
Forme et taille d'installation (unité : mm)
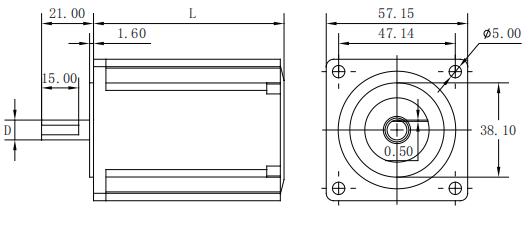
Mode d'arbre du moteur
| Modèle | Arbre Diamètre (mm) |
Arbre Rallonge (mm) |
Arbre Longueur (mm) |
| LC57H355 | f8 | Coupe D 0,5 x15 | 21 |
| LC57H380 | f8 | Coupe D 0,5x15 | 21 |
| LC57H3100 | f8 | Coupe D 0,5x15 | 21 |
Schéma de câblage du moteur
Couleurs des fils du moteur

Définitions de l’encodeur Couleurs de plomb
| 1 | jaune | EB+ |
| 2 | vert | EB- |
| 3 | noir | EA+ |
| 4 | bleu | EA- |
| 5 | Rouge | +5VCC |
| 6 | Blanc | ÉGND |
Remarques
1. Les phases doivent être correctement connectées lors de la connexion du moteur et du pilote.
2. Une génération évidente de chaleur du moteur peut se produire dans différentes conditions de conduite. La température de surface du moteur peut dépasser 85 ℃ pendant le fonctionnement.
3.Motor must be positioned by installation rabbet on front cover of motor, attention shall be paid on error matching, and the concentricity between motor shaft and load shall be controlled strictly.
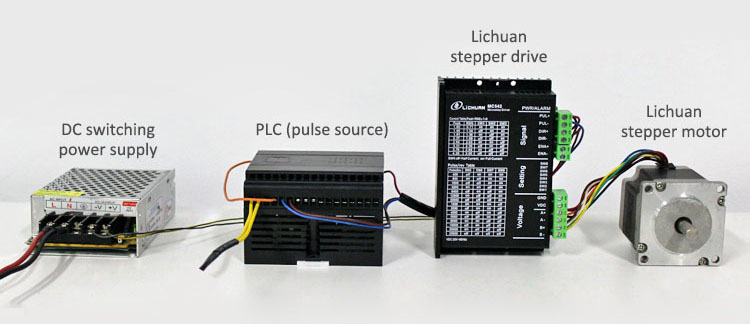
Schéma de câblage de l'application
Un système complet de contrôle de moteur pas à pas doit inclure le produit illustré ci-dessous
L'emballage du produit

Machine de produits de production d'usine de Lichuan
-

Machine à découper -

Équipement de revêtement -

Machine de marquage au laser de fibre -

Machine à visser -

Machine d'essai -

Imprimante UV
-

Machine à souder automatique -

Machine d'essai de couple de maintien -

Machine à vis -

Machine oscillographe
Applications industrielles
-

Bras robotique -

Machine à découper au laser
-

impression en 3D -

Machine cnc -

Assertion automatique -

Machine à graver
Balises actives: Moteur pas à pas en boucle fermée Nema23 triphasé série 57, Chine, fabricants, fournisseurs, usine, personnalisé, fabriqué en Chine, pas cher, CE, durable, qualité
Catégorie associée
envoyer une demande
N'hésitez pas à faire votre demande dans le formulaire ci-dessous. Nous vous répondrons dans les 24 heures.